单摆分析
1. 模型描述
理想单摆由以下要素构成:
- 一根不可伸长、质量可忽略的细线;
- 一个质量为 $m$ 的质点(摆球);
- 摆长为 $l$(悬点到质心的距离)。
摆球在重力作用下沿圆弧运动,忽略空气阻力、悬点摩擦等耗散因素。
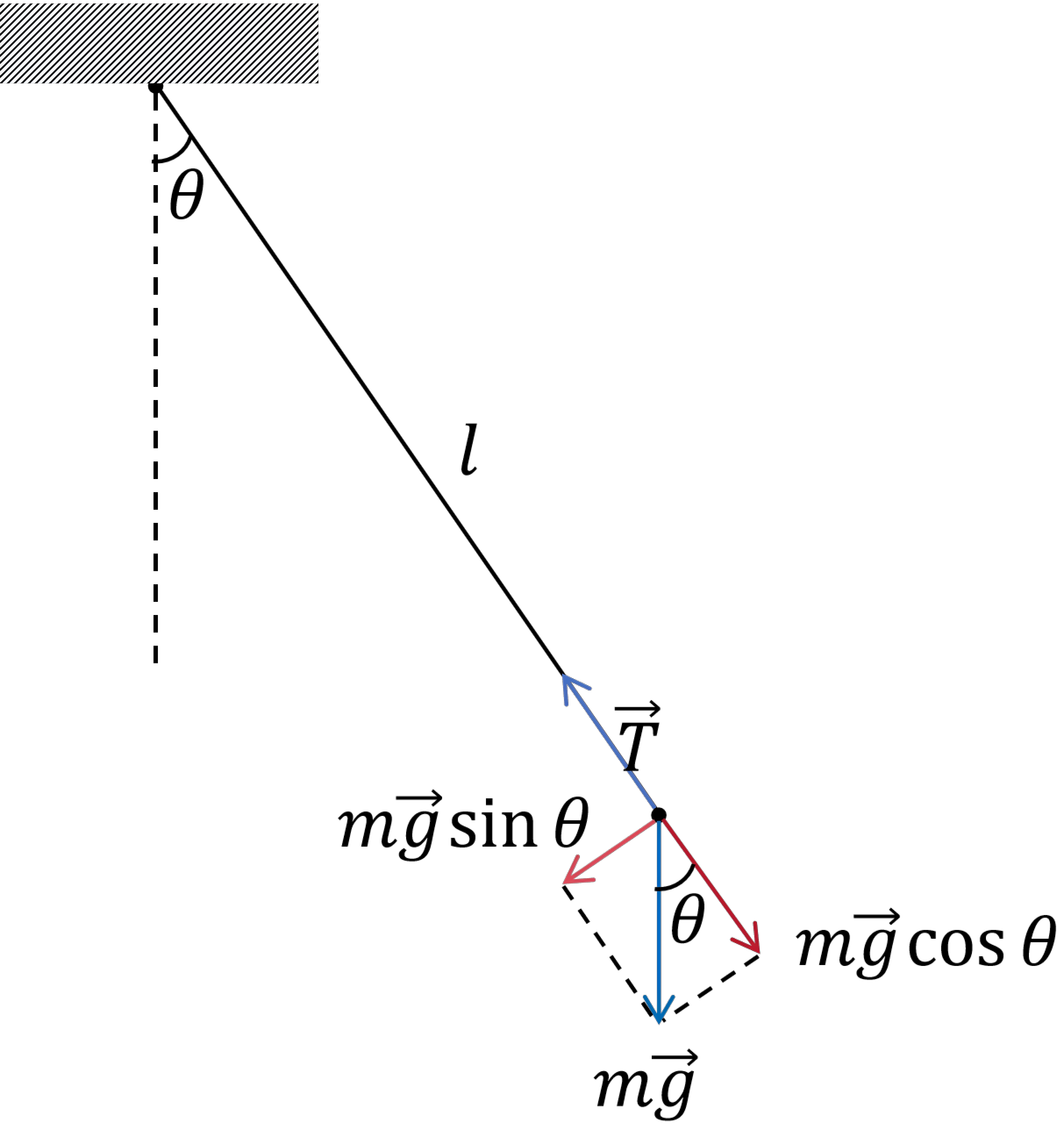
2. 受力分析
当摆球偏离平衡位置(竖直方向)一个小角度 $\theta$ 时,摆球受到两个力作用:
- 重力 $m\vec{g}$ —— 竖直向下;
- 绳子拉力 $\vec{T}$ —— 沿摆线方向指向悬挂点。
为便于分析,将重力沿径向(摆线方向)和切向(垂直于摆线方向)分解:
| 方向 | 分力表达式 | 作用效果 |
|---|---|---|
| 径向 | $mg\cos\theta$ | 与拉力 $\vec{T}$ 平衡,提供向心力 |
| 切向 | $mg\sin\theta$ | 恢复力,方向始终指向平衡位置($\theta=0$) |
注:切向恢复力的大小为 $mg\sin\theta$,方向与角位移 $\theta$ 相反,因此使系统倾向于回复平衡位置。
3. 运动方程(切向)
沿摆球运动轨迹的切线方向应用牛顿第二定律:
$$ \text{切向合外力} = m \times \text{切向加速度} $$
- 切向合外力:$-mg\sin\theta$(负号表示与角位移方向相反)
- 切向加速度:弧长 $s = l\theta$ 的二阶导数,即
$$ a_t = \frac{d^2 s}{dt^2} = l\,\frac{d^2\theta}{dt^2} $$
代入牛顿第二定律,得到
$$ - mg\sin\theta = m\,l\,\frac{d^2\theta}{dt^2} $$
整理为微分方程的标准形式:
$$ \boxed{\frac{d^2\theta}{dt^2} + \frac{g}{l}\sin\theta = 0} $$
这是一个非线性二阶常微分方程,无法直接得到简单的闭式解(需借助椭圆积分)。
4. 小角度近似
当摆角很小时(通常 $\theta < 5^\circ$ 或 $0.1\,\text{rad}$),利用泰勒展开:
$$ \sin\theta = \theta - \frac{\theta^3}{6} + \cdots \approx \theta $$
忽略高阶项,得到线性化方程:
$$ \boxed{\frac{d^2\theta}{dt^2} + \frac{g}{l}\,\theta = 0} $$
该方程为二阶线性常系数齐次微分方程,对应简谐振动。
5. 求解线性化方程
5.1 特征方程与特征根
设解的形式为 $\theta(t) = e^{rt}$,代入方程得:
$$ r^2 + \frac{g}{l} = 0 \quad\Longrightarrow\quad r^2 = -\frac{g}{l} $$
特征根为:
$$ r_1 = i\sqrt{\frac{g}{l}}, \quad r_2 = -i\sqrt{\frac{g}{l}} $$
5.2 通解(复指数形式)
两个线性无关的解为 $e^{i\omega t}$ 和 $e^{-i\omega t}$,其中 $\displaystyle \omega = \sqrt{\frac{g}{l}}$。因此通解为:
$$ \theta(t) = C_1 e^{i\omega t} + C_2 e^{-i\omega t} $$
这里 $C_1, C_2$ 为复常数,由初始条件决定。
5.3 化为实函数形式
利用欧拉公式 $e^{i\theta} = \cos\theta + i\sin\theta$ 展开:
$$ \begin{aligned} \theta(t) &= C_1(\cos\omega t + i\sin\omega t) + C_2(\cos\omega t - i\sin\omega t) \\ &= (C_1 + C_2)\cos\omega t + i(C_1 - C_2)\sin\omega t \end{aligned} $$
物理量 $\theta(t)$ 为实数,因此必须要求 $(C_1 + C_2)$ 和 $i(C_1 - C_2)$ 均为实数。令
$$ A = C_1 + C_2 \in \mathbb{R}, \quad B = i(C_1 - C_2) \in \mathbb{R} $$
则通解写为:
$$ \boxed{\theta(t) = A\cos(\omega t) + B\sin(\omega t)} $$
5.4 合并为正弦或余弦形式
利用三角恒等式,正弦与余弦的线性组合可合并为单一余弦(或正弦)函数:
$$ \theta(t) = C\cos(\omega t + \phi) $$
其中
$$ C = \sqrt{A^2 + B^2},\qquad \tan\phi = -\frac{B}{A} $$
- $C$:振幅,表示最大角位移;
- $\phi$:初相位,由初始角度和角速度决定;
- $\omega = \sqrt{g/l}$:角频率,单位为 $\text{rad/s}$。
6. 周期公式
6.1 周期与角频率的关系
对于简谐运动 $\theta(t) = C\cos(\omega t + \phi)$,周期 $T$ 是指振动状态重复一次所需的最短时间,即满足
$$ \theta(t + T) = \theta(t) \quad \forall t $$
代入表达式:
$$ C\cos\bigl(\omega(t+T) + \phi\bigr) = C\cos(\omega t + \phi + \omega T) $$
利用余弦函数的周期性 $\cos(x+2\pi) = \cos x$,可知
$$ \omega T = 2\pi \quad\Rightarrow\quad \boxed{T = \frac{2\pi}{\omega}} $$
6.2 单摆周期公式
将 $\omega = \sqrt{g/l}$ 代入,即得:
$$ \boxed{T = 2\pi \sqrt{\frac{l}{g}}} $$
6.3 重要结论
- 小角度下,单摆的周期与振幅无关(等时性);
- 周期仅取决于摆长 $l$ 和当地重力加速度 $g$;
- 摆长越长,周期越大;重力加速度越大,周期越小。
7. 总结
| 项目 | 内容 |
|---|---|
| 理想模型 | 不可伸长轻绳 + 质点 + 无阻尼 |
| 非线性方程 | $\displaystyle \frac{d^2\theta}{dt^2} + \frac{g}{l}\sin\theta = 0$ |
| 小角度近似条件 | $\theta \ll 1$(通常 $\theta < 0.1\,\text{rad}$) |
| 线性化方程 | $\displaystyle \frac{d^2\theta}{dt^2} + \frac{g}{l}\theta = 0$ |
| 运动规律 | 简谐振动:$\theta(t) = C\cos(\omega t + \phi)$,$\omega = \sqrt{g/l}$ |
| 周期公式 | $\displaystyle T = 2\pi \sqrt{\frac{l}{g}}$ |
拓展提示:当摆角较大时,周期会随振幅增大而增加,需用椭圆积分修正;实际单摆常因空气阻尼、悬点摩擦而呈现衰减振动,运动方程将引入阻尼项。
参考
[1]程守洙,江之永,胡盘新.普通物理学(第五版)[M].高等教育出版社,1998.